در ادامه مطالب بیان شده در خصوص سنسور زاویهای به بررسی طراحی آزمایشگاهی سنسور زاویهای میپردازیم. به منظور بررسی تأثیر فاصله بین MPLC و MPMR، یک سنسینگ هد،[ 1 ] متشکل از MPLC، سیم پیچ مدولاسیون و تعدادی وسیله کمکی، طراحی و ساخته شد. وسایل کمکیِ ساخته شده از دور الومین شامل یک نگهدارنده استوانهای معین، لوله مدورِ 15 میلی متری و یک کاور سیم پیچ میباشد. وسایل کمکی توسط ماشین کاریِ تخلیه الکتریکی سیمی با سرعت بالا (WEDM) ساخته شدند، MPLC توسط یک نگهدارنده استوانهای معین، نگداشته شده (براحتی در وسط قرار گرفته) است.
سیم پیچ مدولاسیون که از 235 حلقه (دور) تشکیل شده است در دور لوله مدور 15 میلیمتری پیچیده شده است. این سیم پیچ از یک سیم لعابی با قطر 0.1 میلیمتر تشکیل شده است، MPLC که دارای ساختار دو لایهای است از PZT8 و FeNi تشکیل شده است.
لایه PZT8 به عنوان ماده پیزو الکتریک با ابعادِ 12 * 6 * 0.8 میلیمتر مکعب ساخته شده است، الکترودها در دو سطح بزرگ، توزیع میشوند. لایهی FeNi به صورت تجاری با ابعاد 12 * 6 * 1 میلیمتر مکعب عرضه شده است. نمونه، با لایه PZT8 و FeNi توسط چسب اپوکسی، به هم پیوند داده شده است.
برای ایجاد پیوند قوی بین لایهها، نمونه در دمای 80 درجه سانتی گراد به مدت 4 ساعت تحت بار (فشار خارجی)، عمل آوری شد (سخت کاری شد). فرکانس تشدید MPLC، در حدود 172 کیلو هرتز میباشد، MPLR یک آهنربای ثابت چهار قطبی با ابعاد D30 – 26 * 5 میلی متر مکعب میباشد.
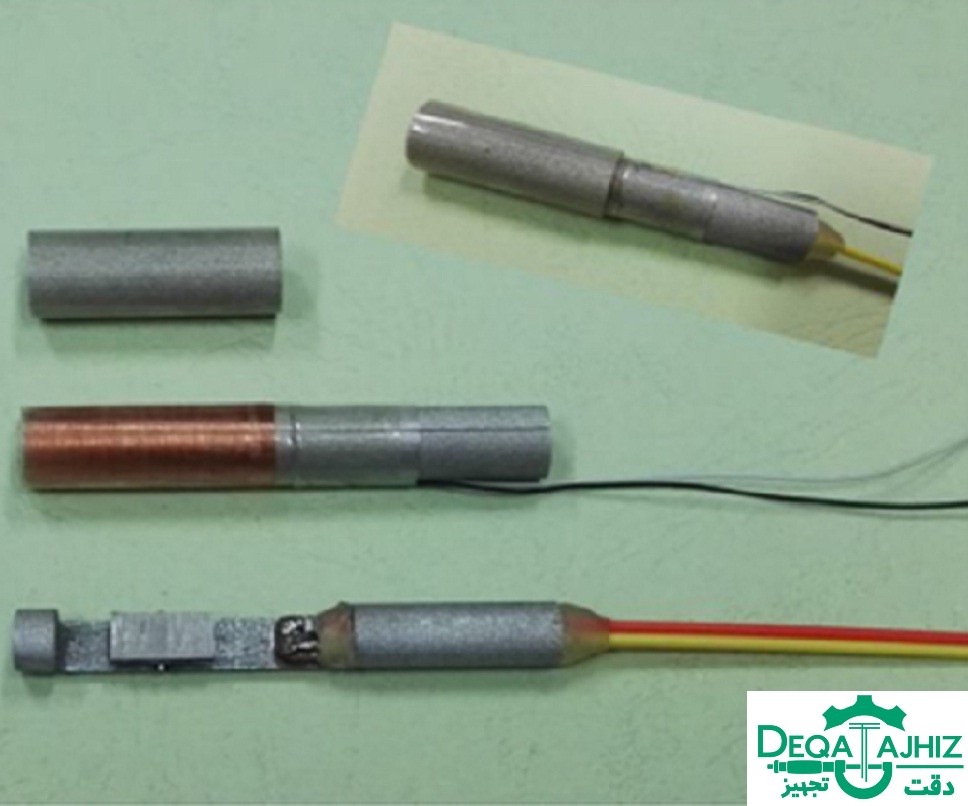
شکل 2. ساختار سنسینگ هِد که متشکل از MPLC، سیم پیچ مدولاسیون و تعدادی قطعه کمکی میباشد
تنظیمات آزمایشگاهیِ مورد استفاده برای تعیین خصوصیات سنسور در شکل 3، نشان داده شده است. همان طور که در شکل 3، مشاهده میکنید، MPMR روی محوری که محکم به یک سروو موتور [2] متصل شده، نصب شده است. موتور روی یک پایه ساکن از جنس فولاد کربی سوار شده است که قادر است، جلوی نشت شار مغناطیسی بسیار کوچک موتور[3] را بگیرد. سنسینگ هد در یک پایه L در کنار MPMR ، چفت شده است. از طریق حرکت پایه L، فاصله بین سنسینگ هد و MPMR را میتوانیم تنظیم کنیم. سیستم کنترل موتور، PLC را به صورت هسته کنترل و صفحه نمایش لمسی، در حد واسط فرد و کامپیوتر به کار میگیرد.
این زیمنس plc باعث میشود که تماشای سیستم مساعد شود و کار با آن آسان شود. یک ژنراتور سیگنال فانکشن [4] برای اعمال سیگنال سینوسی با فرکانس 172 کیلوهرتز و 10 Vpp در سیم پیچ، مورد استفاده قرار گرفت. با چرخش محور استوانهای، سیگنال خروجی از سنسور مذکور، توسط یک نوسان نما (اسیلوسکوپ)، مانیتور شد. علاوه بر این، یک سیستم آزمایش Lab VIEW بر اساس کارت نمونه برداری داده، ایجاد شد.
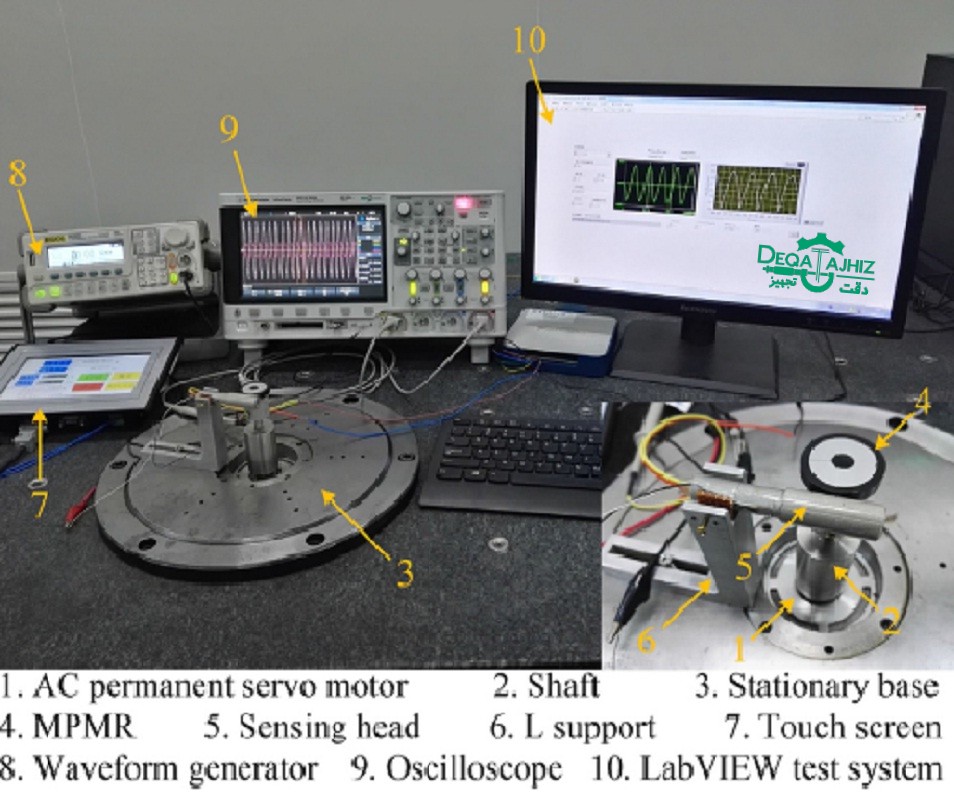
شکل 3. سیستم آزمایشگاهی (تجربی)
لغات مربوط به شکل
- موتور سرو و ثابت و پایدار
- AC: محور استوانهای
- پایهی ثابت و بیحرکت
- حلقه آهنربایی چند قطبی
- سنسینگ هِد،
- پایه
- L: صفحه تاچ (لمسی)
- ژنراتور شکل موج
- نوسان نما (اسیلوسکوپ)
- سیستم تست Lab VIEW
نتایج
شکل 4، سیگنال خروجی سنسوری را به شما نشان میدهد که در آن فاصله بین MPLC و MPMR برابر با نیم میلیمتر است. آنالیز نظری نشان میدهد که مقدار ولتاژ خروجی تحت تأثیر تغییرات H mr می باشد.
سیگنال خروجی از سنسور یاد شده که در آن فاصله بین MPLC و MPMR برابر با نیم میلی متر است: (a) زمانی که در مقابل سطح مشترک دو قطب مغناطیسی قرار می گیرد (آن دو را برعکس ( آپوزیت) میکند)، سیگنال خروجی به مقدار بیشینه خود میرسد و (b) زمانی که MPLC در مقابل قطب N یا S قرار بگیرد (آن دو را برعکس کند)، سیگنال خروجی به مقدار مینیمم می رسد.
همان طور که در پاراگراف بالا اشاره شد، زمانی که MPLC در مقابل (مخالف) سطح مشترک دو قطب قرار میگیرد (یا میشود این گونه معنی کرد که MPLC، سطح مشترک دو قطب را برعکس میکند)، Hmr به مقدار بیشینه میرسد. سپس، بزرگی و دامنه سیگنال خروجی [5] (Vamp) میتواند 10.5 ولت باشد، همان طور که در شکل 4 نشان داده شده است.
این نتایج، نشان داد که با آنالیز نظری از طریق اندازه Vamp میتوان اطلاعات زاویههای را محاسبه (تعیین ) کرد. شکل 5، رابطه بین Vamp و زاویه چرخش را در سنسوری که فاصله بین MPLC و MPMR در آن برابر با نیم میلیمتر است، نشان میدهد، همان طور که مشاهده میکنید، 4 دور [ 6 ] در محدوده 360 درجه وجود دارد که توسط تعداد قطب های آهنربا ، تعیین شده است. نوک رأس شکل موج (نمودار موجی) مربوط به سطح مشترک دو قطب است و گودی موج (قسمت فرورفته)، مربوط به قطب N یا S میباشد.
ثبات و همسان بودن Vamp در پریودهای متفاوت، منعکس کننده کیفیت MPMR میباشد. در یک دوره، Vamp نسبت مستقیم و معکوسی با زاویه چرخش دارد (ابتدا با افزایش زاویه چرخش افزایش مییابد اما سپس با افزایش زاویه چرخش کاهش مییابد)، که این نرخ/ نسبت را میتوان با افزایش تعداد قطبها، بهبود داد. برای بهینه سازی عملکرد سنسور یاد شده، سنسینگ هد دیگری را میتوان به سیستم افزود و در سمت دیگر MPMR قرار داد. فرکانس Hmr نسبت مستقیمی با سرعت چرخش دارد.
دقت تجهیز پیشگام در ارائه بروزترین فناوریهای تجیهزات و دانش حوزه اتوماسیون صنعتی در ایران
[1] sensing head
[2] servo motor
[3] small magnetic fluxl leakage of motor
[4] Function signal generator
[5] amplitude of the output signal
[6] period


دیدگاه خود را ثبت کنید
میخواهید به بحث بپیوندید؟مشارکت رایگان.