هدف از این کار این است که روبات در مورد اشیای محیط پویا آگاه باشد و با خودکار سازی به روزرسانی با درک هویت جدید در مورد دانش خود، خود آگاه شود.
اگر روبات در محیط شناخته شده نتواند یک شی را درک کند، پس نمیتواند به هنگام اجرای کار به آن ارجاع کند، که باعث میشود همکاری در تیم به خطر بیافتد. روشی برای بازنمود دانش ضروری است. در حال حاضر، هستی شناسی یکی از استراتژیهای ممکن برای مجهز کردن سطح دانش عاملهای ادراکی است که گاهی اوقات میتواند محدودیتهای بسیار کمی داشته باشد (Lieto, Lebiere, & Oltramari, 2018). مسئلهی مدل سازیِ فرآیندهای فراگیریِ دانش پویا را میتوان با استفاده از باز نمودهای فضاهای مفهومی غنی سازی کرد که با بازنمود هستیشناسی مطابقت داشته باشد (Lieto, Chella, & Frixione, 2017). ما این نوع بازنمود را در نظر داریم، زیرا وسیعترین بازنمود بوده و اجازه میدهد با استفاده از مبنای هستیشناسی استاندارد شود.
هستی شناسی تنها یک سلسله مراتب نیست، زیرا اجازه میدهد رواط معنای فراتر از یک استنتاج قطعی باشد.
هستی شناسی مجموعهای از مفاهیم، افراد و نقشها هستند. مفاهیم یعنی هویتهای انتزاعی، و میتوان آنها را باز نمود سمبلیک دانش دانست. افراد وقایعی از مفاهیم هستند، و نشانگر هویتهای واقعی در محیطاند. نقشها ویژگیها هستند، که میتوانند ارتباطی و یا دادهای باشند. ویژگیهای ارتباطی روابط انتزاعی بین مفاهیم و دادهای نیز ویژگیهای مفهومی است که دارای مقادیر داده مانند است.
شکل 2 نمونهای از یک هستی شناسی سطح بالا است که تنها مفاهیم یک سلسه مراتب را در بر میگیرد (بدون وقایع متناظر). سطح بالا مجموعهای از مفهومهایی که ربات دارد را نشان میدهد، تمام چیزیهایی که میتواند بر روی آن منطق داشته باشد. هر بار ربات مفهومی را درک و مشاهده میکند که قبلاً برایش شناخته شده است، یک واقعه از آن شی ایجاد میکند.
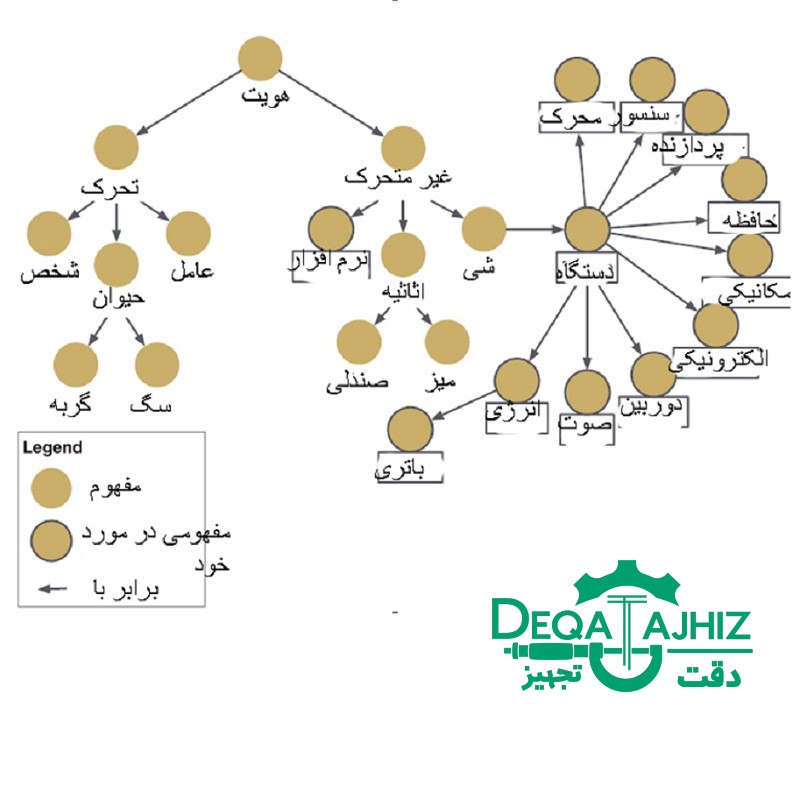 شکل 2. جزئیات هستی شناسی که شامل تمام مفاهیم مربوط به خود است. مفاهیم با مربع نشان داده شده است
شکل 2. جزئیات هستی شناسی که شامل تمام مفاهیم مربوط به خود است. مفاهیم با مربع نشان داده شده است
این هستی شناسی معمولاً قبل از پیاده سازی رباتها کدگذاری میشود. اگر ربات در یک محیط پویا قرار بگیرد، انتظار میرود یک هستی شناسی پویا به هنگام درک اشیای جدید رشد کند. بنابراین، چالشهای مربوطه اینها هستند که چطور دانش فراگیری شدهی جدید در زمان اجرا باز نمود و مدلسازی شود.
بیایید یک سناریوی نمونه را در نظر بگیریم که در آن یک روبات در یک محیطی قرار دارد که دانش سطح بالای آن در شکل 2 نشان داده شده است. در واقع این یک گلچینی از کل هستی شناسی بوده و برای شفافیت، مفاهیم مربوط به عناصر مربوط به خود که در روبات وجود دارد را برجسته کردهایم. این عناصر اجزای فیزیکیِ روبات را تشکیل میدهند، که به عنوان بخشهای داخلیِ محیط در نظر گرفته میشود. در شکل 3، همین هستیشناسی با مفاهیمی که روبات درک کرده و سپس واقعه سازی کرده است غنی میشود. در اینجا میتوانیم بگوییم که این مفاهیم را «میداند» و یک یا چند واقعه از آنها را در محیط شناسایی میکند.
بیایید فرض کنیم هدف روبات تعمیرِ خود است.
خود تعمیری میتواند در کاربردهایی که در آن هیچ انسانی وجود ندارد که در تعمیر روبات کمک کند ضروری است، و باید روبات بتواند خودش را تعمیر کند. همچنین، برای همکاری با انسانها برای تعمیر سایر ماشینها نیز میتواند این امر کمککننده باشد.
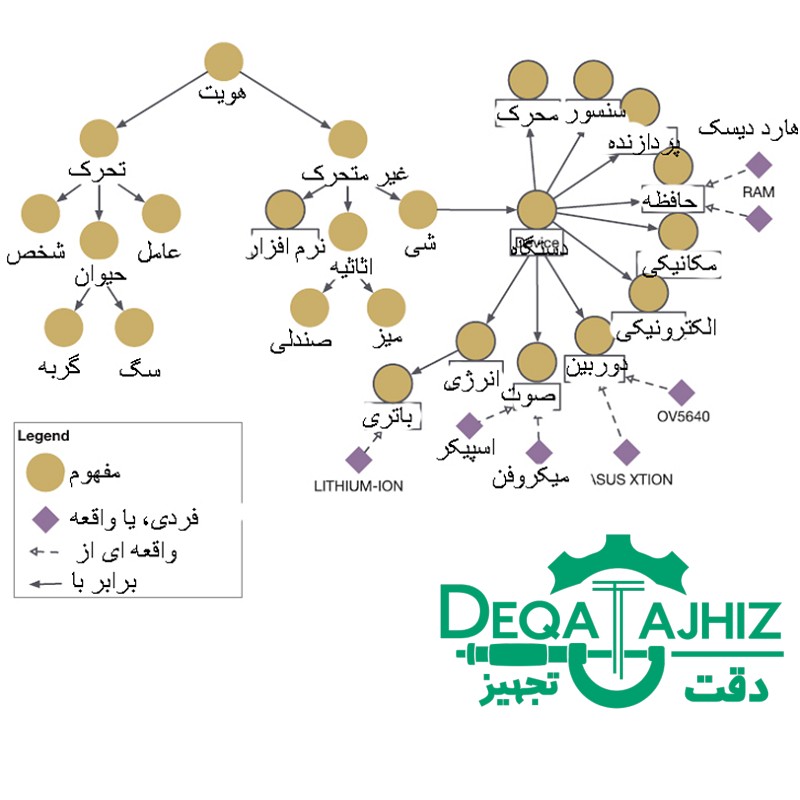 شکل 3 . جزئی از هستی شناسی که شامل تمام مفاهیم در مورد محیط و وقایع آن است
شکل 3 . جزئی از هستی شناسی که شامل تمام مفاهیم در مورد محیط و وقایع آن است
شناخت آسیب اولین گام برای خود تعمیری است، روبات آگاهی از این منبع را کسب کرده و میتواند نحوهی تعمیر آن را درک کند، این کار، برای مثال با شناسایی شی مورد استفاده و یا مجموعهای از اقدامات ضروری برای جایگزینی انجام میشود. در حالت کلی، روباتها میتوانند خود تشخیصی داشته باشند و ببینند آیا جزئی مشکلساز شده است یا نه. هدف اصلیِ تشخیص این است که تمام دستگاهها و عملکردهای آن بررسی شده و ببینیم آیا دستگاه دارای خطایی است یا نه: تا این لحظه، روبات هیچ اطلاعی در مورد این دستگاه ندارد.
این روبات به صورت پسیو وضعیت داخلی را به انسان منتقل میکند، اما نمیتواند این وضعیت را درک کند. برای آغاز خود تعمیری، روبات باید به صورت معنایی دستگاه را برای مداخله مفهوم سازی کند. به عبارت دیگر، با خود تشخیصی، روبات میداند که دستگاه دچار مشکل شده است، اما منبع آن را نمیداند، و تا زمانی که در دانش فرا گرفته نشود، یک مفهوم انتزاعی باقی میماند. سناریویی که ما پیشنهاد میکنیم برای این مرحله است.
روبات ممکن است از قبل چیزی در مورد این دستگاه نداند، و یا می تواند دانشی جزئی در مورد آن داشته باشد. در شبیهسازی ما از استفاده کرده و آن را مجبور کردهایم یک مشکل سخت افزاری را با کتابخانهی خود تشخیصی، تشخیص دهد، که متغیر d را که نام یک منبع آسیب احتمالی است بر میگرداند. بیایید فرض کنیم که CPU این منبع است، و داریم d=cpu.
همانطور که از شکل 3 میبینیم، CPU عنصری است که برای روبات شناخته شده نیست. روبات میتواند عنصر جدید را پردازش کند، آن را به یک عنصر شناخته شده لینک کند و یک واقعهی جدید تولید کند ذکر این نکته حائز اهمیت است که ما نمیدانیم آیا عنصر دانش به محیط خارجی وابسته است یا داخلی. در این رویکرد، ما از یک مفهومسازی وسیع برای محیط استفاده میکنیم.هنگامی که هویت جدیدی درک شود، دو حالت مختلف را میتوان مد نظر قرار داد:
- مفهوم انتزاعی که قبلاً در دانش مدل سازی شده است. یک واقعه ی جدید برای آن مفهوم باید ایجاد شود که با هویت درک شده مطابقت دارد. این فرآیند را فرآیند مسیر دهی مینامیم.
- مفهوم انتزاعی در دانش مدلسازی نشده است. در اینجا باید هم مفهوم و هم واقعه ایجاد شود. این مفهوم ثابت خواهد بود. این فرآیند را فرایند ادغام مینامیم. این در حالتی است که در مثال قبلی منبع CPU را در نظر گرفتیم.
در هر دو حالت، مسئله به استنباط حضور/ عدم حضور مفهوم در دانش و شناسایی انتساب صحیحی برای مفهوم/ واقعهی جدید در هستیشناسی مربوط است که باعث ایجاد دروننگری روبات میشود.


دیدگاه خود را ثبت کنید
میخواهید به بحث بپیوندید؟مشارکت رایگان.