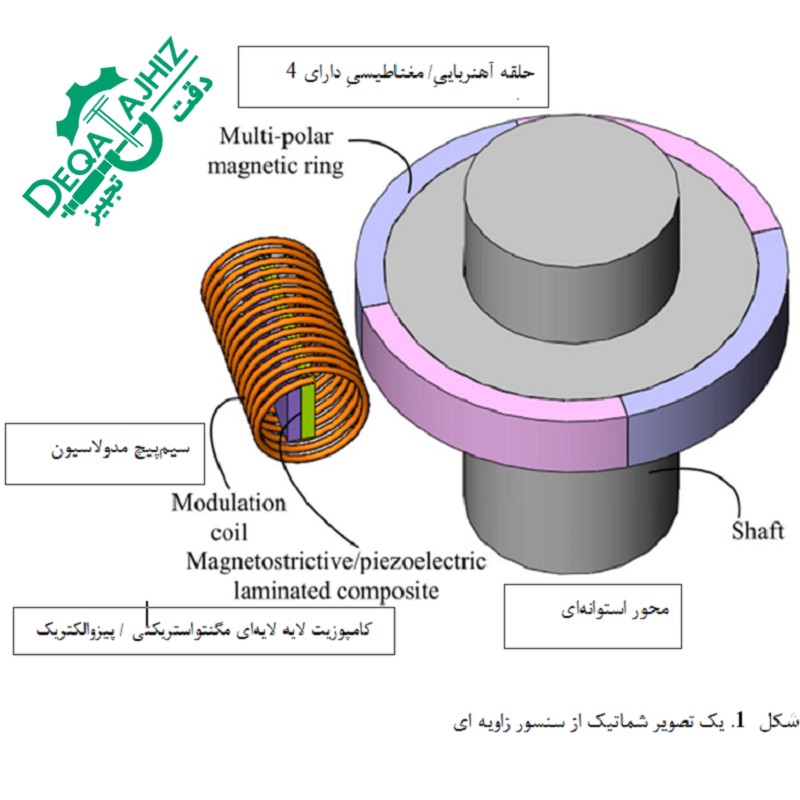
در این مقاله با آنالیز و طراحی سنسور مگنتو الکتریک آشنا میشویم لطفا با ما همراه باشید. یک دیاگرام شماتیکی از سنسور زاویهای بر مبنای اثر مگنتو الکتریک (ME) در شکل 1، نشان داده شده است.
سنسور مگنتو الکتریک شامل یک MPLC (کامپوزیت ورقهای)، سیم پیچ مدولاسیون، MPMR (آهنر بای 4 قطبی) و یک محور استوانهای میباشد. لازم به ذکر است که MPLC یک لایه PZT است که لایه FeNi روی آن قرارگرفته است. لایه PZT در راستای ضخامت پلاریزه شده است. لایه FeNi در امتداد راستای طول، مغناطیسی شده است و MPMR یک کامپوزیت مغناطیسی پایا میباشد که دارای 4 قطب است.
قطبهای مغناطیسی (آهنربا) در امتداد راستای محوری (شعاعی)، مغناطیسی میشوند. مغناطیس شدگی (مغناطیش پذیری) در دو قطب مغناطیسی مجاور، در جهتهای مخالف هم میباشد (یکی N و دیگری S است)، MPMR به محور استوانهای متصل میباشد، از این رو میدان مغناطیسی اطراف MPMR میتواند شامل اطلاعات چرخشی و پارامترهای چرخشی باشد و MPLC در کنار MPMR قرار میگیرد، MPLC و MPMR دارای صفحه تقارن یکسانی میباشد. سیم پیچ مدولاسیون دورِ MPLC پیچیده شده است. این سیم پیچ برای اعمال یک میدان مغناطیسی AC در MPLC استفاده میشود.
 از طریق بارگذاری یک جریان AC در سیم پیچ مدولاسیون، یک میدان مغناطیسی AC در MPLC اعمال میشود. به منظور داشتن عملکرد خروجی خوب، فرکانس جریان AC برابر با (هم تراز با) فرکانس تشدید MPLC، تعیین شده است، MPLC تحت تأثیر تغییرات میدان مغناطیسی قرار میگیرد و میدان مغناطیسی AC منجر میشود که لایه مگنتو استریکتیو، استرس (تنش و بار) ایجاد کند. سپس، استرس ایجاد شده به لایه پیزو الکتریک که سیگنال الکتریکی را تولید میکند، منتقل میشود. زمانی که محور استوانهای میچرخد، MPMR یک میدان مغناطیسی متناوب را در MPLC اعمال میکند، محور استوانهای (شَفت) با سرعت بالایی، هم چون 3000 rpm میچرخد، فرکانس میدان مغناطیسی متناوب فقط 200 کیلو هرتز است که نسبت به فرکانس تشدید MPLC، خیلی کمتر است.
از طریق بارگذاری یک جریان AC در سیم پیچ مدولاسیون، یک میدان مغناطیسی AC در MPLC اعمال میشود. به منظور داشتن عملکرد خروجی خوب، فرکانس جریان AC برابر با (هم تراز با) فرکانس تشدید MPLC، تعیین شده است، MPLC تحت تأثیر تغییرات میدان مغناطیسی قرار میگیرد و میدان مغناطیسی AC منجر میشود که لایه مگنتو استریکتیو، استرس (تنش و بار) ایجاد کند. سپس، استرس ایجاد شده به لایه پیزو الکتریک که سیگنال الکتریکی را تولید میکند، منتقل میشود. زمانی که محور استوانهای میچرخد، MPMR یک میدان مغناطیسی متناوب را در MPLC اعمال میکند، محور استوانهای (شَفت) با سرعت بالایی، هم چون 3000 rpm میچرخد، فرکانس میدان مغناطیسی متناوب فقط 200 کیلو هرتز است که نسبت به فرکانس تشدید MPLC، خیلی کمتر است.
بنابراین، در مقایسه با میدان مغناطیسی AC، میدان مغناطیسی ایجاد شده توسط MPMR را میتوان به عنوان یک میدان مغناطیسی DC که توسط MPLC یافت شده است، در نظر گرفت. تحت عملکرد میدان مغناطیسی DC، سیگنال خروجی از MPLC بایستی با چرخش محور ( شفت) تغییر کند. به عبارت دیگر، میدان مغناطیسی DC با پارامترهای چرخشی از جمله سرعت چرخش و پوزیشن (موقعیت)، ارتباط دارد (به آنها وابسته است). از این رو، از طریق تشخیص و آنالیز تغییر سیگنال خروجیِ MPLC، تستهای دینامیکی و استاتیکی پارامترهای چرخشی را میتوان تحقق بخشید ( درک کرد). زمانی که MPLC در حالت L-T کار میکند، بر مبنای روش مدار معادل، ضریب مگنتو الکتریک هم نوا / تشدید شدهی (α vreson) مربوط به MPLC قابل تعیین خواهد بود.
Q mech = فاکتور کیفیت مکانیکی؛ S11 E و S33H = ضرایب انطباق الاستیک در میدان الکتریکی دارای قدرت (نیروی) ثابت و میدان مغناطیسی دارای قدرت ثابت؛ d31p و d33m = ضرایب پیزو الکتریک و پیزو مگنتیک؛ ε33 T = گذردهی دی الکتریک در تنش و استرس ثابت؛ k31 = ضریب کوپلینگ الکترومکانیکی مواد پیزوالکتریک؛ n= نسبت ضخامت لایههای مگنتو استریکتیو و t = ضخامت مواد پیزو الکتریک سیم پیچ مدولاسیون پیچیده شده به دور MPLC شبیه به یک سولنوئید (سیم پیچ سلف) میباشد. طول آن کمی بیشتر از MPLC میباشد.
میدان مغناطیسی اعمال شده به MPLC یک میدان مغناطیسی یکنواخت (یونیفرم) نمیباشد و فرمولهای ریاضی میدان مغناطیسی سولنوئید برای این موقعیت (وضعیت) مناسب نیستند. بنابراین، زمانی که سیم پیچ مدولاسیون یک جریان سینوسی AC دارایِ دامنه (بزرگی) را در فرکانس تشدیدِ MPLC (freson) حمل میکند، میدان مغناطیسی متوسط (متوسط میدان مغناطیسی اعمال شده)، یعنی Hmc در MPLC را به راحتی میتوان بهدست آورد.
HMC = دامنهی Hmc و t = زمان بر اساس معادله پارامترهای فوق، ولتاژ خروجی MPLC ( Vout ) را میتوان حساب کرد. از این رو، چه شَفت بچرخد چه نچرخد، MPLC همیشه یک سیگنال خروجی را تحت عملکرد سیم پیچ مدولاسیون خواهد داشت. با چرخش محور استوانهای، میدان مغناطیسی اعمال شده در MPLC، توسط MPMR تغییر میکند (متغیر خواهد بود). رابطه میدان مغناطیسی متوسط در امتداد راستای طولی در لایه مگنتو استریکتیو (Hmr) و زاویه چرخش (Ɵ) دارای خصوصیت سینوسی خوبی میباشد. از این رو، Hmr را میتوان به سادگی به دست آورد.
HMR= دامنه و بزرگی Hmr، N= تعداد قطبهای مغناطیسی و S = سرعت چرخشی و فرکانس Hmr (frota) و سپس s را میتوان تعیین کرد. در مقایسه با freson، frota بسیار آهسته است (زمانی که S =3000 RPM، f rota برابر با 200 هرتز است). لازم به ذکر است که، Hmr درست مثل یک میدان مغناطیسی DC یافت شده توسط MPLC است.
Vout مسلما با d33m ارتباط دارد، اما در ضمن، تحت میدان مغناطیسی بایاس متفاوت، d 33m درست مثل H mr در این وضعیت، تغییر خواهد کرد. با افزایش
(گسترش یافتنِ) میدان مغناطیسی بایاس، d 33 m به یک مقدار بیشینه میرسد. زمانی که بزرگی میدان مغناطیسی بایاس کمتر از آن مقداری است که d 33m را به مقدار بیشینهاش میرساند، d33m یک رابطه خطی با میدان مغناطیسی بایاس خواهد داشت. بنابراین، زمانی که بزرگی Hmr مناسب است، ولتاژ خروجی (Vout) نسبت مستقیمی با Hmr دارد.
از این رو، با چرخش محور استوانهای، اطلاعات زاویهای (زاویه) را میتوان از طریق اندازهگیری بزرگی (دامنهیِ) Vout تعیین کرد و سرعت چرخشی با فرکانس متغیر دامنهی V out، ارتباط دارد. به منظور بررسی تأثیر فاصله بین MPLC و MPMR، یک سنسینگ هد، متشکل از MPLC، سیم پیچ مدولاسیون و تعدادی وسیله کمکی، طراحی و ساخته شد وسایل کمکیِ ساخته شده از دورالومین شامل یک نگهدارنده استوانهای معین، لوله مدورِ 15 میلیمتری و یک کاور سیم پیچ میباشد. بدین وسیله سیستمی برای آزمایش سنسور طراحی شده که به آن خواهیم پرداخت.


دیدگاه خود را ثبت کنید
میخواهید به بحث بپیوندید؟مشارکت رایگان.