سیستم کنترل DCS یا سیستم کنترل توزیع شده، سیستمهایی هستند که در اواسط دهه نود میلادی در مباحث کنترل فرآیند و در حقیقت جهت تکمیل سیستمهای DDC پا به عرصه وجود نهاد. یک سیستم کنترل DCS سیستمی است که به عوض اینکه در یک نقطه متمرکز باشد، پراکنده است. ماژولهای میکروپروسسوری که با کمک هم عملکرد سیستم کنترل را کنترل و مانتیور میکنند اجزای تشکیل دهنده سیستم کنترل توزیع شده را تشکیل میدهند. این اجزا با توجه به کامپیوترها و البته بسته به محیط سایت، جانمایی میشوند در نتیجه کاهش هزینه نصب و وایرینگ را منتج میگردند.
علی رغم اینکه DCS در زمره شبکه های کامپیوتری است، اما با شبکههای اداری و خانگی موجود تفاوت دارد، چرا که در سیستم DCS پردازش Real Time بر عکس آنچه در پردازشهای خانگی یا اداری، مطرح میباشد. این دو روش در نحوه اجرای برنامهها با یکدیگر تفاوت دارند. در کامپیوترهای معمولی، یک برنامه تنها در یک زمان اجرا می شود به صورتی که این برنامه با دادههایی ثابت و مشخص محاسبات پیچیده را آغاز کرده و پس از دستیابی به نتیجههایی مطلوب در نهایت به پایان میرسد و هنگامی که پردازش به پایان رسید برنامه متوقف گردیده و تا اجرای مجدد با اطلاعاتی جدید فرمان پذیرد.
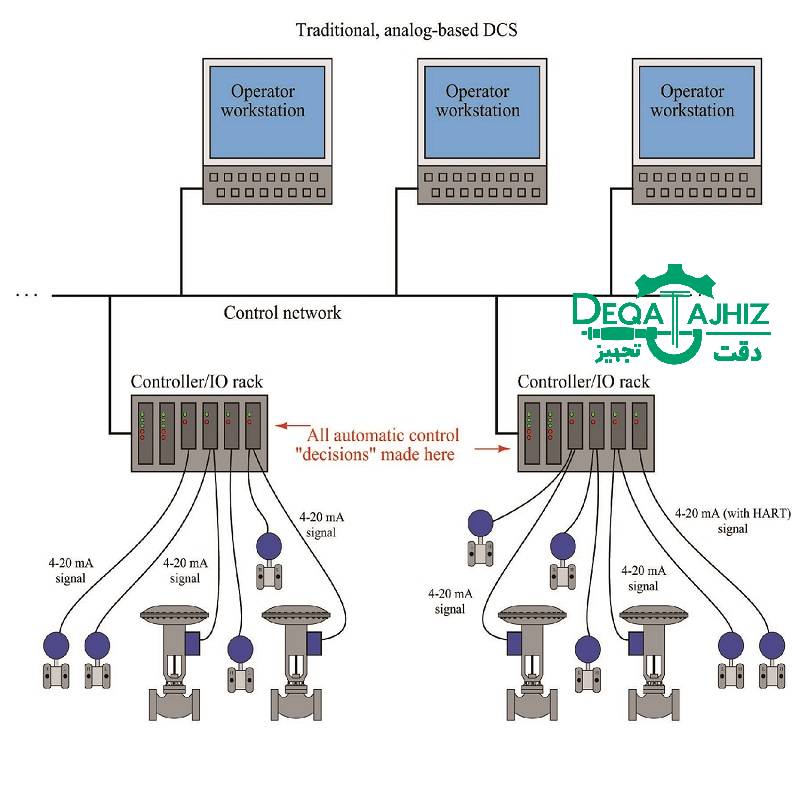
در شیوه پردازش Real Time نیز، پردازش با یک سری داده ثابت شروع شده و تفاوت در اینجاست که اجرای همان برنامه به صورت مکرر تداوم مییابد و دادهها و اطلاعات با در نظر گرفتن اطلاعات مرحله پیشین نوسازی میگردد. به عنوان مثال کنترل اتوماتیک سرعت خودرو را میتوان به عنوان یک عملکردReal Time در نظر گرفت. کنترل با داده ثابت سرعت آغاز گردیده و در هر مرحله از سرعت ماشین نمونه برداری شده و با توجه به تفاوت اختلاف آن با سرعت مطلوب، سیگنال های کنترلی در خصوص باز و بسته شدن دریچه بنزین اعمال می گردند. عملکرد یک کنترلر DCS نیز به همین منوال است، یعنی به صورت مستمر از صدها یا هزاران سیستم تحت کنترل نمونه برداری کرده و سپس محاسباتی را بر اساس یک طرح مشخص برای سیستمهای مربوطه تکرار مینماید.
دادهها و اطلاعات محیطی و فیزیکی
دادهها و اطلاعات محیطی و فیزیکی را میتوان به دو دسته اصلی تقسیم نمود:
دادههای آنالوگ
دادههای آنالوگ بطور مستمر تغییر می نمایند . این داده ها به وسیله حلقه های کنترلی و نرم افزاری که بر اساس نیاز ممکن است از کنترلرهای نسبی یاPID تشکیل شده باشند، آنالیز شده و سیگنال های خروجی مناسب صادر گردد.
دادههای گسسته
نحوه کار با این دادهها آسان بوده و با عنایت به سیگنال های دریافتی و روابط منطقی، موجب قطع و وصل ورودی می گردند. همچون تمامی کنترلرهای منطقی قابل برنامه ریزی، مواردی همچون دماسنج، آمپرمتر، فشارسنج، دبی سنج و … برای دریافت دادهها از محیط DCS مورد نیاز می باشد مقادیر آنها به سیگنالهای الکتریکی تبدیل شده، DCS این مقادیر را قرائت نموده و به سیگنالهای دیجیتال تبدیل مینماید. دادههایی که بدین صورت بدست میآیند میتوانند در موارد ذیل مورد استفاده قرار گیرند:
- فیدبکها یا حلقههای کنترلی برای کنترل آنالوگ
- اجرای برنامههای منطقی برای صادر نمودن دستورالعمل های قطع و وصل
- نمایش مقادیر بر روی مانیتور
- تهیه گزارش از وضعیت سیستم
- اعلام خطر در حالت نامناسب سیستم تحت کنترل و عملیات های دیگری که متناظر با نوع سیستم، قابل تعریف است

مزیتهای سیستم DCS در مقایسه با سیستمهای قدیمی
- قابلیت تطبیق و گسترش به دلیل ماژولار بودن سیستم
- کنترل پذیری بالا به دلیل تغییر آسان پروسه الگوریتم کنترل
- امکان مجتمع سازی کارکردهای سیستم
- امکان نگهداری آسان پس از نصب
- برخلاف سیستم متمرکز، در سیستم DCS به دلیل تقسیم بندی کنترل، در صورت خرابی یکی از ماژولها کنترل بر روی قسمت های دیگر بدون هیچ گونه نقصی به کار خود ادامه می دهد که به آن پدیده Fault Isolation گفته میشود.
- سیستمهای DCS قابلیت گسترش دارند. در این سیستمها می توان با افزایش ماژول های کنترلی، عملکرد کنترل را گسترش داد در حالیکه در سیستم کنترل مرکزی، گسترش سیستم مستلزم تعویض پردازنده مرکزی و خرید یک سیستم پیشرفته تر است.
- برنامه نویسی DCS در محیطهای سطح بالا انجام گرفته و این مورد برخلاف کنترلرهای PLC است که برنامه نویسی آنها مستلزم آشنایی با سیستم های میکروپروسسوری است.
همانطور که قبلا توضیح داده شد، DCS میتواند از ماژول های کنترلی بسیاری تشکیل شده باشد که بطور مستقل و همزمان عمل می کنند؛ بعلاوه دارای قابلیت ارتباط سریع بین ماژول های خویش است که از طریق خطوط ارتباطی با بزرگراه داده به روش Real Time امکان پذیر می گردد.
سخت افزار یک سیستم DCS
سخت افزار هر سیستم DCS را می توان به اجزاء کلی ذیل تقسیم نمود:
- بخش پردازنده و کنترل
- مدارات واسط ورودی – خروجی
- مدارهای واسط ارتباطی
- Redundanc (پشتیبان)
- Diagnostics (خطا یابی)
در ادامه هر یک از موارد فوق را بررسی خواهیم کرد.
1. بخش پردازنده و کنترل
جهت پیاده سازی الگوریتم های کنترلی بر روی ورودیها و خروجی های مناسب از این بخش بهره گرفته میشود. با توجه به اینکه در یک واحد زمانی کوچک، اجرای الگوریتمهای پیچیده مورد نیاز میباشد، وجود پردازندهای قوی و پر قدرت را میطلبد.
پیاده سازی این الگوریتمها نیاز به تجهیزات شبیه سازی و تست خاص، تسلط کافی به زبان ماشین و یا زبانهای کاربردی پردازندهی مورد استفاده دارد که همه این موارد، استفاده از واحدهای مبتنی بر پردازندههای سری اینتل و کارتهای مبتنی بر ساختار PC جهت پیاده سازی آن را بیش از پیش توجیه پذیر میسازد.
2. مدارات واسط ورودی – خروجی
وظایف این بخش، دریافت دادهها از ترانسدیوسرها و سنسورها و یا اعمال نتایج حاصل از منطق کنترلی به اجزاء دیگر سیستم کنترل از قبیل عملگرها، شیرها و … میباشد.

حداقل امکانات یک سیستم کنترل گسترده
- ایزولاسیون کامل
- قابلیت تنظیم حداقلی
- قابلیت عیب یابی داخلی و اطمینان از صحت عملکرد
- قابلیت ایجاد ارتباط با پردازنده اصلی
- قابلیت پیاده سازی برخی پیش پردازشها
- قابلیت جایگزینی و عیب یابی بصورت آنلاین
- قابلیت استفاده به صورت پشتیبان
- سرعت نمونه برداری قابل قبول
- دقیق بودن و تفکیک پذیری قابل قبول در مبدل های آنالوگ به دیجیتال
با در نظر گرفتن این نیازها، استفاده از مدارات مبتنی بر پردازنده در این گونه واحدها نیز اجتناب ناپذیر می باشد. اما با توجه به محدود بودن حوزه عملکرد هر واحد، امکان به کارگیری پردازندههایی با قدرت کمتر و یا خاص در آنها امکان پذیر می باشد. یکی از مسائل عمده در این واحدها پیاده سازی ایزولاسیون کامل می باشد.
در انواع دیجیتال، این ایزولاسیون با استفاده از یکی از سادهترین روشها یعنی اپتو ایزولاسیون انجام می پذیرد، اما در انواع آنالوگ با توجه به تنوع و دقت مورد انتظار از این گونه سیستمها و همچنین امکان خود تنظیمی این اجزاء، بحث کمی پیچیدهتر و مشکلتر میشود.
3. مدارات واسط ارتباطی
یکی از مهمترین و در عین حال پیچیدهترین بخشهای سیستم DCS مدارات واسط ارتباطی میباشد. این شبکهها به انواع مختلفی تقسیم میگردند که میتوان به موارد زیر اشاره نمود:
- شبکه ارتباطی بین کارت های ورودی خروجی و بخش های پردازنده و کنترل
- شبکه ارتباطی بین واحدهای پردازنده و کنترلرهای مختلف
- شبکه ارتباطی بین تجهیزات HMI و کنترلرها
- شبکه ارتباطی بین سیستم DCS
4. پشتیبان (Redundance)
از مهمترین مباحث در سیستمهای کنترل مثل انواع مدلها و سریهای زیمنس plc امنیت عملیاتی و در دسترس بودن سیستم در طول زمان میباشد. به همین منظور از سیستمهای Redundance استفاده می گردد. این سیستم در کلیه سطوح سخت افزار سیستم از قبیل واحدهای I / O شبکه های ارتباطی، منابع تغذیه و… بسته به ماهیت فرآیند و درجه امنیت آن پیاده سازی می گردد.
پیاده سازی عملیاتی واحدهایRedundance از دیگر مشکلات اساسی سیستم های گسترده است، زیرا با توجه به Real Time بودن بخشها، اجزاء باید به گونه ای عمل کنند تا حین تعویض، هیچ گونه شوکی به سیستم وارد نگردد و این تعویض به صورت Hot در سرویس باشد و در آن لحظه، کلیه اطلاعات و عملکرد اجزاء دیگر را در اختیار داشته باشند. این امر نیازمند یک ارتباط اطلاعاتی کامل بین اجزا بوده، ضمنا شرایط مختلف تعویض حالت نیز میبایست برای سیستم به صورت دقیق تعریف گردد.
5. عیب یابی یا اشکال زدایی (Diagnostics)
یکی دیگر از مواردی که در ساخت و پیاده سازی یک سیستم DCS باید مورد توجه قرار گیرد، مورد بسیار پر اهمیت عیب یابی اتوماتیک و خود عیب یابی (Self-Diagnostics) میباشد. این عیب یابی میبایست تمامی بخشهای سخت افزاری از قبیل تجهیزات HMI، واحدهای کنترلر، کارتهایI/O شبکههای ارتباطی، و … باشد که به این منظور با استفاده از الگوریتمهای خاص و بکارگیری تمهیدات مختلف در طراحی سخت افزار سیستم میتوانید به این امر مهم دسترسی پیدا کنید. امکانات حداقلی یک محدوده Diagnostic شامل تشخیص خطا و اعلام به اپراتور جهت رفع آن باشد.


دیدگاه خود را ثبت کنید
میخواهید به بحث بپیوندید؟مشارکت رایگان.