
کنترل کننده PID یک الگوریتم کنترلی متداول است که در صنعت اتوماسیون و ابزار دقیق مثل ifm سنسور کاربردهای فراوانی دارد. کنترل کنندههای PID جهت کنترل کمیتهای مختلف با دقت بیشتر استفاده میگردند. در بیش از ۹۵ درصد کنترل کنندههای صنعتی از PID بهره گرفته میشود. معمولا جهت تنظیم سرعت، جریان، دما، فشار و دیگر کمیتهای فرایند از این روش استفاده میگردد.
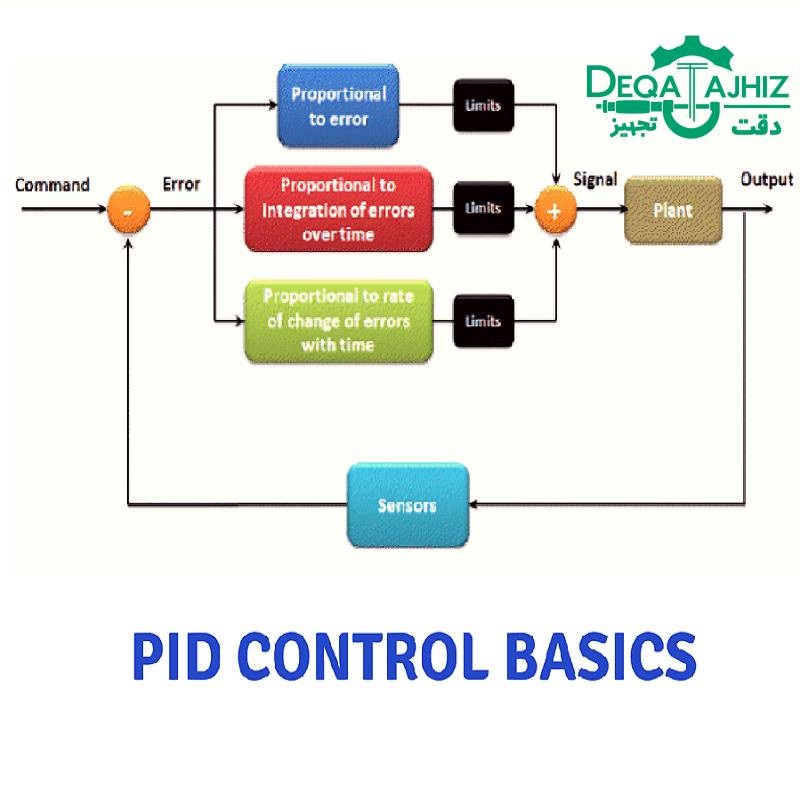
این الگوریتم عملکردی قوی و ساده دارد و به همین دلیل در برنامههای بزرگ صنعتی از مقبولیت ویژهای برخوردار است. این کنترلر ترکیبی است از اعمال عملگرهای تناسبی، انتگرال گیر و مشتق گیر و به همین دلیل به آن PID گفته میشود.
انتگرالی(Integral)، مشتقی (Derivative)، تناسبی (Proportional). در هر کنترلر PID این سه ضریب برای نیل به واکنش بهینه متغیر میباشند. ورودی که متغیر فرایند واقعی نامیده میشود از طریق سنسور وارد شده و خروجی که متغیر تنظیم واقعی نامیده میشود بدست میآید.
کنترل کننده PID یک الگوریتم کنترلی متداول است که در صنعت اتوماسیون و ابزار دقیق کاربردهای فراوانی دارد، خروجی را به صورت پیوسته تا زمانی که متغیر فرایند به مقدار مشخص شده برسد تغییر میدهد و به صورت یک سیستم حلقه بسته عمل مینماید. در کنترل دستی بررسی و تنظیم متغیر فرایند تحت کنترل مانند سرعت، دما، فشار، جریان و … توسط اپراتور انجام میگیرد ولی در سیستم خودکار به صورت اتوماتیک و خودکار این امر صورت میپذیرد.
تمامی کنترل کنندههای صنعتی مدرن از نوع خودکار یا حلقه بسته بوده و غالبا برای جهت تولید بهینه یک یا ترکیبی از اقدامات کنترلی بر روی آنها اعمال میگردد.
اقدامات کنترلی میتوانند به شرح زیر باشند:
- روشن خاموش نمودن کنترلر
- کنترل کننده تناسبی
- کنترل کننده تناسبی-مشتقی
- کنترل کننده تناسبی-انتگرالی
- کنترل کننده تناسبی-انتگرال-مشتقی
در مورد کنترلر پی آی دی، دو وضعیت برای کنترل متغیر امکان پذیر است، زمانی که متغیر فرایند کمتر از نقطه تنظیم و یا کاملا خاموش باشد یا وقتی متغیر فرآیند بالاتر از نقطه شروع باشد.
بنابراین، خروجی بین دو حالت نوسان خواهد داشت. جهت کنترل با دقت بالاتر و عدم وجود نوسانات اکثر صنایع از کنترل کنندههای PID, PI ,PD استفاده مینمایند که در ادامه به بررسی آنها خواهیم پرداخت.
از مهمترین شرکتهای تولید کننده کنترلر PID و زیمنس plc میتوان به شرکتهای زیمنس siemens، یوکوگاوا yokogawa، و هانیول honeywell اشاره نمود.
کنترل کننده P
کنترلر تناسبی (Proportional) و یا کنترل کننده P، خروجی متناسب با خطای فعلی خواهد بود. منظور از خطا خطای بین نقطه تنظیم و متغیر فرایند یعنی e = SP-PV میباشد. مقدار خطا ضرب در ضریب تناسبی (Kc) پاسخ خروجی را مشخص مینماید یا به عبارت دیگر بهره تناسبی نسبت واکنش خروجی متناسب با مقدار خطا خواهد بود. به عنوان مثال اگر مقدار خطا برابر 10 باشد و (Kc) برابر 2، در نتیجه پاسخ تناسب عدد 20 خواهد بود.
در صورتی که خطا صفر باشد پاسخ یا همان خروجی کنترلر صفر میباشد. سرعت پاسخ یا واکنش گذرا متناسب با مقدار بازدهی تغییر مینماید. و اگر (Kc) بالاتر از محدوده طبیعی باشد متغیر فرایند دارای نوسان بالاتر بوده و سبب ناپایداری سیستم خواهد شد.
علی رغم این که این کنترل کننده سرعت قابل قبولی در پایداری متغیر فرایند دارد ولیکن هواره شاهد خطایی بین نقطه تنظیم و متغیر فرایند واقعی هستیم که در اغلب موارد از تنظیم یا بایاس دستی جهت کاهش این خطا در صورتی که این کنترلر به تنهایی مورد استفاده واقع شود، بهره گرفته میشود. با همه این اوصاف هیچ گاه شاهد خطای صفر در این کنترلر نخواهیم بود و همواره یک خطای حالت پایدار در واکنش کنترلر نوع P وجود دارد.
کنترل کننده I
از این کنترلر معمولا جهت پایین آوردن خطای حالت پایدار سیستم بهره گرفته میشود. کنترلر انتگرالی (Integral) یا کنترل کننده I انتگرال عبارت خطا را در مدت یک دوره زمانی با هم ترکیب مینماید تا هنگامی که خطا صفر گردد. این امر نشان دهنده این مورد است که حتی یک خطای کوچک میتواند منجر به تولید پاسخ انتگرالی بالایی شود.
در حالت خطای صفر، خروجی دستگاه کنترل نهایی را در آخرین مقدار خود جهت حفظ خطای حالت پایدار صفر نگه داشته ولیکن در مورد این کنترلر زمانی خروجی صفر میشود که خطا صفر باشد. در صورتی که خطا منفی باشد پاسخ انتگرالی کاهش مییابد سرعت پاسخ به آرامی صورت میپذیرد و هنگامی که کنترلر I مورد استفاده قرار میگیرد، پاسخ حالت پایدار بهبود یافته و با کاهش مقدار انتگرال، سرعت پاسخ افزایش مییابد. در اکثر موارد جهت دستیابی به سرعت قابل قبول و حالت پایدار بهتر برای کنترل کنندههای تناسبی و انتگرالی بهتر است این دو کنترلر به صورت ترکیبی مورد استفاده قرار بگیرند.
اکثر کنترل کنندههای PI در عملیات صنعتی جهت بهبود واکنشهای حالت پایدار و حالت گذرا مورد استفاده قرار میگیرند.
کنترل کننده D
در این کنترلر متغیر فرآیند سریعا در واحد زمان تغییر نموده و خروجی متناسب با نرخ تغییر را تولید میشود. خروجی مشتق شده با نرخ تغییر خطای ضرب شده در یک ثابت مشتق برابر است. از کنترل کننده مشتق(Derivative) یا کنترل کننده D.
زمانی مورد استفاده قرار میگیرد که متغیر پردازنده با سرعت بالا تغییر کند. در چنین مواردی، کنترل کننده مشتق ابزار کنترل نهایی (مانند شیر کنترل یا موتور) را در چنین مسیری حرکت داده تا تغییر سریع یک متغیر فرآیند را خنثی نماید.
لازم به ذکر است که کنترلر D به تنهایی نمی تواند برای هر کاربرد کنترلی مورد استفاده قرار گیرد. این کنترلر سرعت واکنش را افزایش داده و در واقع رفتار آینده خطا را پیش بینی مینماید تا از نوسانات سیستم جلوگیری نماید. این امر از نوسانات شدید در خروجی در حالتی که تغییر ناگهانی توسط اپراتور صورت میپذیرد، جلوگیری مینماید.
با توجه به اینکه واکنش مشتق به نویز بسیار حساس میباشد در بسیاری از کنترل کنندهها به همین دلیل و البته دشواری پیاده سازی، از کنترلر نوع D صرفنظر نموده و به صورت PI پیاده سازی میگردد. چرا که حتی با نویز بسیار پایین هم خروجی بالایی را خواهد داشت.
ترکیب کنترلرهای I ,P و D
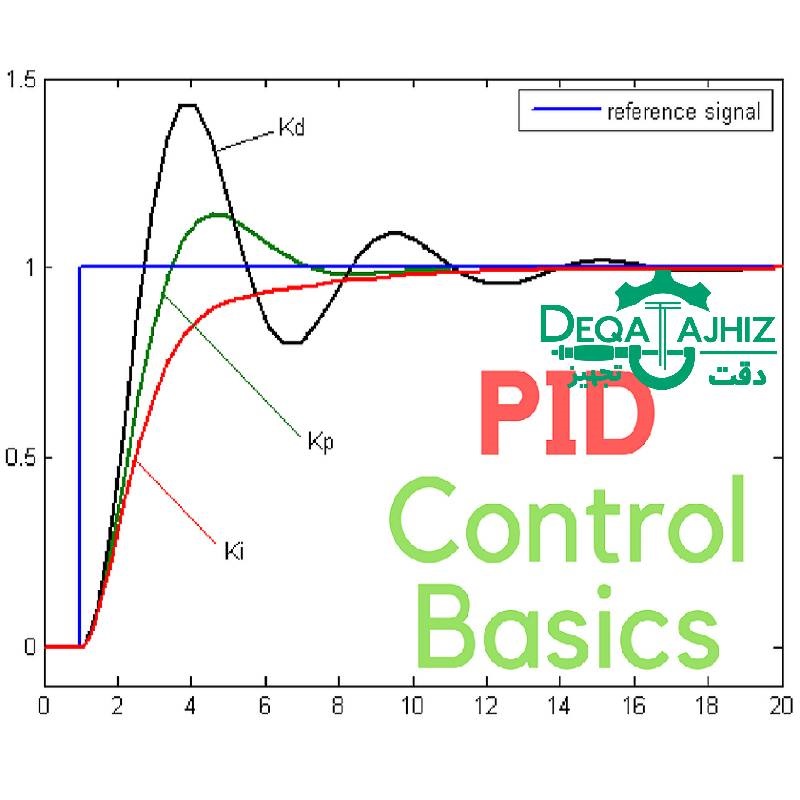
حال که نحوه کار کنترلرهای پی، آی و دی را به صورت مجزا بررسی کردیم میدانیم که از ترکیب این سه کنترلر با هم کنترلر پی ای دی شکل میگیرد که کاربردی جهانی دارد. این نکته حائز اهمیت است که شخصی که از آن استفاده مینماید میبایست تنظیمات پی آی دی را بداند و از ان به درستی جهت ایجاد خروجی مطلوب بهره ببرد. در یک کنترل کننده PID ضریب Kp سرعت سیستم را افزایش داده و خطای حالت دائم را تا حدودی کم مینماید. (اما صفر نمیکند).
ضریب Ki خطای حالت دائم را صفر مینماید اما نوسانات ناخواسته زیادی به پاسخ گذرا میافزاید و در نهایت ضریب Kd نوسانات پاسخ گذرا را تضعیف نموده و پاسخ پله را به حالت پله ایده آل نزدیک تر مینماید.
برای تنظیم کنترلر PID و یافتن ضرایب مطلوب از روشهای گوناگونی میتوان بهره برد که میتوان به روش زیگلر-نیکولس و روش آزمایش و خطا و بررسی منحنی واکنش فرایند اشاره نمود.
کنترل کننده PID به دلیل ساختار کنترلی ساده در انواع مختلفی از فرایندها مورد استفاده قرار میگیرند.


دیدگاه خود را ثبت کنید
میخواهید به بحث بپیوندید؟مشارکت رایگان.